
Seja você uma empresa de serviços de inspeção visual, uma grande cidade ou uma pequena cidade / novo negócio que está começando, é importante pesar os prós e contras antes de fazer grandes investimentos de capital. Comprar o equipamento certo é a chave para ter bons dados, operadores felizes e uma operação tranquila.
O objetivo deste guia é responder a quaisquer perguntas que você possa ter sobre equipamentos de inspeção de sistemas de esgoto e ajudar a identificar recursos importantes a serem procurados com base em suas necessidades específicas.
Aqui estão algumas das perguntas que respondemos:
- Qual é a diferença entre Mainhole Camera(Zoom Camera), Endoscópio/Boroscópio, Push Cameras e Crawlers?
- Para quais tipos de projetos esses Crawlers são úteis?
- Do que eu preciso em um Crawler?
- Do que eu preciso em termos de software para fazer um bom relatório?
- Quanto custam essas coisas?
- Além de esgoto, onde mais esses Crawlers são usados?
- Quais são as diferentes opções de câmeras?
O QUE É UM CRAWLER?
Existem muitas palavras que são usadas para descrever os robôs de inspeção de tubo – Crawlers. Dentro deste guia, o termo “Pipe Crawler” ou somente “Crawler” será usado exclusivamente, no entanto, muitos termos são usados de forma intercambiável.
Crawlers são robôs de inspeção remota de tubulações controlados por controle remoto. Tipicamente, crawlers são montados com câmeras de pan / tilt. Existem cabos presos ao crawler para fornecer o feed da câmera, dados e, em alguns casos, energia direta para o crawler da estação de controle acima do solo. Alguns controles podem vir de um computador montado em um caminhão e alguns são totalmente portáteis. Utilizando um sensor de rastreamento de distância no carretel do cabo, os operadores receberão feedback ao vivo da posição do crawler no tubo. Isso é importante para entender onde certas características estão quando o usuário localiza e registra a anomalia para uma resposta direcionada.
Assim como os tubos para os quais são projetados para entrar, os pipe crawlers vêm em uma variedade de tamanhos. As opções menores se encaixam em tubos tão pequenos quanto 4 polegadas, mas têm capacidades muito mais limitadas do que seus equivalentes maiores. Tipicamente, crawlers menores não podem percorrer longas distâncias, lidar com tanta sujeira ou transportar cargas tão grandes. Para realizar uma inspeção adequada do tubo, os operadores precisarão encontrar um crawler com tamanho adequado para a câmera ser capaz de centralizar dentro do tubo. Para tubos menores, a centralização da câmera é baseada nas rodas do veículo e na posição de montagem da câmera. Para crawlers maiores, a câmera pode ser levantada e abaixada para se centralizar através de um braço. Alguns braços são robóticos, permitindo que sejam controlados por meio de um controlador na superfície, enquanto outros dependerão de um braço colocado manualmente antes do início da inspeção do tubo.
A centralização da câmera permite que os operadores vejam o máximo possível do tubo a partir de uma posição de câmera nivelada ou de “posição inicial”. Isso permite uma compreensão geral da condição do tubo sem precisar mover a câmera em torno de pan ou tilt. Uma vez identificada uma possível falha ou anomalia que vale a pena explorar mais a partir da posição inicial, o usuário pode ajustar a câmera e, em alguns casos, usar a funcionalidade de zoom para examinar defeitos mais detalhadamente.
A centralização da câmera também é um requisito para inspeções certificadas. Globalmente, existem várias associações orientadoras sobre as melhores práticas para inspeções de tubos, como NASSCO e WRc. Essas associações fornecem uma metodologia padrão e uma linguagem compartilhada para ajudar a tornar dados de inspeção e a comparação entre tubos mais fáceis. Parte disso é identificar facilmente a localização de falhas, onde a posição de pan, a posição de tilt e a contagem de comprimento do cabo (a distância que o crawler está dentro do tubo) são importantes.
Quer saber mais sobre a certificação NASSCO PACT? Visite nosso artigo sobre o assunto!
COMO MONITORAR A INSPEÇÃO EM UM CRAWLER?
Enquanto o crawler percorre um tubo, o operador e inspetores monitoram a transmissão de vídeo e outros dados em uma tela. Alguns crawlers são operados com controladores portáteis, alguns com laptops e controles, e outros com configurações completas em uma mesa na parte de trás de um caminhão ou van. Cada tipo possui suas vantagens e desvantagens, e o melhor para você depende de suas prioridades. Alguns controladores de tablet ou consoles possuem saídas de vídeo e opções de conexão, o que permite ao operador alternar facilmente entre um controlador portátil e um sistema montado.
Controladores Portáteis
Prós:
- Maior portabilidade
- Mais fáceis de operar para novos usuários
Contras:
- Relatórios e entrada de dados limitados

Desktops Montados em Caminhões
Prós:
- Configuração mais confortável para o operador
- Fácil de personalizar para atender às necessidades do operador
Contras:
- Menos flexíveis para acessar locais remotos ou de difícil acesso
- Custo mais elevado
Controladores tipo laptop/console
Prós:
– Mais portátil
– Permite entrada de dados e relatórios completos
Contras:
– Pode ser volumoso e pesado
– Alguns têm recursos de relatórios limitados e são limitados a uma tela
Os Pipe Crawlers também têm uma variedade de opções de rodas, dependendo do ambiente. Rodas de borracha são mais comumente usadas para os materiais de tubos mais comuns (concreto, ferro fundido, PEAD, aço corrugado). As opções de esteira(lagarta) são boas para obstáculos e áreas com detritos significativos. Rodas de metal são melhores para tubos de PVC e argila. Rodas pneumáticas são melhores para lama, que são mais comumente encontrados em tubos de águas pluviais de diâmetro maior.
QUANTO CUSTAM OS CRAWLERS?
Os Crawlers variam de preço com base nos acessórios escolhidos. O orçamento padrão para um robô portátil é de cerca de US $ 45.000 a US $ 100.000, dependendo das aplicações e recursos. Robôs montados em caminhões podem custar entre US $ 80.000 e US $ 200.000, mais o custo do caminhão em si, que pode adicionar de US $ 50.000 a US $ 150.000 adicionais.
Também existem outros acessórios para crawlers que são úteis para inspeções de tubos. A transmissão da câmera é o sensor mais comumente usado, no entanto, às vezes é necessário mais detalhes. Nesses casos, tecnologias como laser integrado ou LIDAR ajudam a obter resultados extremamente precisos, mas podem ser demorados e caros. A tecnologia sonar ajuda em ambientes com água turva, mas é relativamente imprecisa em comparação com o laser. A fotogrametria (costura de imagens da câmera) é popular com a tecnologia de drones aéreos e está sendo explorada com mais frequência em crawlers como uma alternativa econômica ao laser, com precisão semelhante e representações realistas dos ambientes.
Laser Ring
Os Laser rings usam um software para obter uma série de imagens com o laser no alvo para construir o modelo. A empresa de software de esgoto WinCan oferece um módulo com esse recurso como exemplo. Um revés do Laser Ring é que o anel completo precisa estar visível no feed da câmera para ser registrado, limitando o diâmetro em que é efetivo. O laser também precisa ficar na frente da câmera do crawler, o que normalmente leva a um design que tem um anel localizado longe do crawler, dificultando o encaixe no tubo.
Prós
– Custo relativamente baixo (~$10.000 com software para construir o modelo)
– Fácil para tubos de pequeno diâmetro
– Preciso
Contras
– Não é útil em tubos de grande diâmetro
– Difícil de implantar alguns tubos, particularmente nos com bueiros/acessos menores
– Podem ser arquivos grandes
– Não funciona na água
Sonar
O Sonar é uma ferramenta incrivelmente versátil que pode ser usada em uma ampla gama de aplicações, usando ondas sonoras para localizar ou mapear objetos e paisagens no ambiente. Como o som viaja mais longe na água, os sensores de sonar de imagem são mais adequados para missões subaquáticas ou em tubulações submersas. O sonar é ideal para determinar a condição geral de tubulações, coletar dados sobre ovalização, níveis de sedimentos e identificar defeitos de grande porte; mas não fornecem o nível de detalhe necessário para tomar decisões de avaliação de condição em pequenos defeitos. Eles são frequentemente referidos como o sensor mais importante em um ROV pelos pilotos de ROV.
Prós
– Funciona debaixo d’água
– Confiável e pode trabalhar em grandes áreas / tubos de grande diâmetro
Contras
– Alto custo ($ 10.000 a $ 200.000)
– Não funciona em ambientes secos
– Não é o mais preciso
Fotogrametria
A fotogrametria é um processo realizado através da interpretação de fotografias com base na sobreposição de imagens e cálculos de paralaxe. O uso de imagens para criar modelos 3D de estruturas complexas fornece aos operadores informações detalhadas sobre os ambientes que estão inspecionandos e oferece uma ótima maneira de manter registros históricos ou rastrear e monitorar a degradação ao longo do tempo. Trabalhando debaixo d’água, um ROV é ideal para modelagem arqueológica 3D, capturando imagens confiáveis e a capacidade de ser implantado praticamente em qualquer lugar sem impor riscos aos mergulhadores. Usado em combinação com o sonar em condições de baixa visibilidade, a filmagem do sonar pode ser sobreposta com imagens ou, em alguns casos, usada sozinha para criar um modelo fotogramétrico.
Prós
– Representação mais realista
– Preciso
– Pode ser rentável com processos manuais, mas isso seria demorado
Contras
– Pode ser caro ao automatizar a geração de modelos (US$ 30.000 a US$ 500.000)
– Tecnologia ainda muito nova (em tubos)
QUAL A DIFERENÇA ENTRE PUSH CAMERA, ENDOSCÓPIOS, E DE ZOOM PARA INSPEÇÕES COM CRAWLERS?
O que é uma Push Camera?
A Push Camera é outra ferramenta para realizar inspeções em tubulações. Às vezes chamadas de pushrod cameras, parecem semelhantes a um pequeno crawler, mas não possuem motores ou capacidade de condução. As rodas fornecem estabilidade para a câmera enquanto o usuário empurra o cabo rígido pela tubulação. Eles oferecem uma solução mais econômica e rápida para inspeções de tubulações. Eles também podem se encaixar em tubulações menores, algumas com diâmetro de até 1″. As push cameras também são uma excelente opção onde há pequenas curvas, manobrando ao redor de joelhos de diâmetro pequeno.
A compensação é a falta de controle sobre onde a câmera se volta e a distância que pode percorrer pela tubulação. A maioria das push cameras começa a ter problemas em cerca de 30 metros, especialmente se estiver em uma tubulação de diâmetro maior. Se a tubulação tiver diâmetro suficientemente amplo, a push camera enrolará dentro da tubulação. Além disso, sem o braço de elevação comum nos Crawlers, a câmera pode se enterrar facilmente em detritos ou debaixo d’água, tornando difícil obter imagens adequadas. Devido à sua capacidade de entrar em tubulações de diâmetro estreito (1-4″), uma câmera push é um excelente complemento para um crawler de esgoto. Além disso, para um novo contratado que trabalha principalmente em tubulações de pequeno diâmetro, eles podem ser a melhor opção para começar como uma solução econômica. As câmeras push custam entre $15.000 e $45.000, dependendo das características e capacidades.
O que é um Endoscópio/Boroscópio?
Um endoscópio ou boroscópio é o menor formato de câmera para a indústria de água e esgoto. Existem muitas opções para isso, com versões maiores que podem articular, bem como versões menores que simplesmente são empurradas pelo ralo de uma pia. Essas são as opções mais simples e com menor custo para obter imagens em uma tubulação. Elas não serão capazes de ir muito longe e serão facilmente interrompidas por obstáculos ou detritos. Esses sistemas atuam principalmente como um item complementar na caixa de ferramentas e são comuns, especialmente para encanadores. Endoscópios estão disponíveis na Amazon por tão pouco quanto $40, mas unidades de ponta podem custar alguns milhares de dólares, dependendo da durabilidade, alcance e qualidade.
O que é uma Zoom Camera?
Como o nome indica, as câmeras com zoom são projetadas especificamente com enormes recursos de zoom. Elas normalmente são abaixadas por um tripé acima de um bueiro, alinhando a câmera com a entrada do cano. A câmera então usa uma mistura de zoom óptico e digital para ver centenas de metros no esgoto. Os resultados dependem do ambiente. Quaisquer curvas no tubo ou defeitos físicos podem impedir que a câmera veja além de um certo ponto, embora essa seja outra maneira rápida e complementar de realizar inspeções e seja uma boa ferramenta disponível. As câmeras de zoom geralmente custam de alguns milhares de dólares até cerca de US $ 20.000, dependendo dos recursos.
PARA QUAIS TIPOS DE PROJETOS POSSO USAR EQUIPAMENTOS DE INSPEÇÃO?
Existem várias razões diferentes para investigar tubulações de esgoto e águas pluviais. Existem também várias empresas diferentes que realizam esses tipos de inspeções. A lista abaixo não é uma lista exaustiva, mas fornece uma visão geral das aplicações comuns para inspeções de tubos.
Planejamento de Manutenção (Avaliação de Infiltração e Entrada)
A inspeção preventiva é o melhor método para os departamentos de esgoto e águas pluviais gerenciarem seus orçamentos com eficiência. A fiscalização sistemática de toda a rede de tubulações permite que a prefeitura priorize quais tubulações ou quais áreas precisam de mais atenção, bem como quais estão em ótimo estado e não requerem obras imediatas. Se não for possível monitorar a condição continuamente, problemas não detectados podem criar bloqueios ou desabamentos por erosão – grandes vazamentos costumam ser problemas muito antes do “grande evento”. Evitar o grande evento significa reduzir grandes interrupções do serviço, reduzir as horas extras de pessoal crítico e limitar os reparos emergenciais caros que poderiam ter sido evitados com métodos de reabilitação mais econômicos, como revestimento, reparos ou limpeza.
Infiltração e influxo (I&I) é um tópico popular na comunidade de águas residuais. Identificar onde a água está entrando e saindo dos canos, e onde NÃO deveria estar, é um objetivo fundamental para evitar transbordamentos e vazamentos de esgoto que levam a danos públicos. Esses influxos podem vir de uma variedade de fontes, incluindo raízes de árvores que penetram em canos, mau planejamento de serviços públicos levando à perfuração de canos existentes ou rachaduras e degradação ao longo do tempo devido ao desgaste. I&I é um problema que não pode ser resolvido por uma substituição completa do sistema. Substituir redes inteiras de tubos não é possível, e a única maneira de abordar o problema é uma inspeção do sistema para priorizar reparos direcionados com base nos problemas mais críticos e fazê-lo proativamente antes que se tornem emergências.
O processo de inspeção é mais eficiente se for utilizada abordagens recomendadas de associações de esgoto como o NASSCO. Essa linguagem comum e o processo de identificação permitem fácil comparação entre amplas faixas de dados de inspeção.
Levantamentos Pré e Pós Limpeza
A limpeza de tubulações é uma excelente parte de um plano de gerenciamento de águas residuais. Usar jatos de água ou caminhões a vácuo para limpar detritos das tubulações ajuda a evitar bloqueios que levam a transbordamentos de esgoto. A limpeza torna as inspeções mais eficazes, já que os crawlers conseguem navegar mais profundamente nas tubulações e ver a condição estrutural com mais facilidade. A limpeza também ajuda na reabilitação das tubulações, abrindo caminho para métodos de revestimento e reparos.
Para avaliar se uma tubulação deve ser limpa e se pode ser feito com segurança, todas as câmeras mencionadas acima podem ser usadas para avaliar isso. Os crawlers são particularmente úteis para navegar acima dos fluxos e sobre alguns obstáculos e obstruções. Após a limpeza ser concluída, um levantamento pós-limpeza pode ajudar a verificar para o cliente que a limpeza foi de fato concluída.
Levantamentos pós-limpeza também são um momento ideal para realizar inspeções para avaliações de I&I. Normalmente, equipes com crawlers montados em caminhão não são enviadas ao mesmo tempo que equipes de limpeza. Sistemas de crawler portáteis que podem ser integrados a uma equipe de limpeza são um método potencial para capturar dados de inspeção de qualidade dentro da mesma equipe, economizando tempo e dinheiro ao não enviar um caminhão de CCTV dedicado e equipe para o mesmo local.
Avaliação Pré-Construção
Quando a construção está prestes a começar em um determinado local, as empresas de engenharia frequentemente realizam levantamentos sobre a infraestrutura existente naquela área para determinar as melhores estratégias para avançar com o projeto. Uma parte desse planejamento é a infraestrutura subterrânea. As câmeras podem ajudar a avaliar a condição e a segurança de seguir em frente com o projeto.
Um exemplo de motivo para uma inspeção pré-construção é procurar linhas de abastecimento ou escoamento de água, linhas de fibra ótica ou linhas de gás que correm sob o solo. Se não forem conhecidos, há potencial para perda de serviço ou, pior ainda, se uma escavadeira atingir a linha no caso de tubulações de gás. Localizadores de redes de utilidade publica também são ferramentas úteis, mas não serão uma opção eficaz para olhar dentro do tubo.
Avaliação Pós-Construção/Revestimento/Reabilitação
Após um projeto de reabilitação de tubos ou um novo projeto de construção, é importante verificar a condição do trabalho. Tubos recém-instalados correm o risco de afundar no solo recém-escavado. Um inclinômetro em um Crawler é uma excelente maneira de verificar se isso não está ocorrendo, monitorando se o tubo está em um ângulo superior a 1-2 graus durante a inspeção. O Crawler também pode inspecionar as juntas para garantir que estejam intactas.
As pesquisas pós-revestimento podem verificar se não há buracos ou bolhas no revestimento, verificar cortes e até mesmo em alguns casos em que Crawlers são usados para puxar revestimentos através de tubos. As equipes que estão realizando a reabilitação podem se beneficiar ao ter um Crawler totalmente portátil em mãos para realizar essas verificações.
Resposta de Emergência (Bloqueios, Afundamentos, Grandes Vazamentos)
Mesmo com programas de inspeção e reabilitação preventivos, ainda haverá emergências a serem tratadas. Seja uma ruptura de uma tubulação de água, um vazamento perceptível que está causando danos ambientais e afundamentos ou bloqueios que causam transbordamentos de esgoto, esses problemas precisam ser avaliados rapidamente.
As câmeras podem ajudar a identificar o problema, permitindo que as equipes decidam rapidamente qual equipamento e estratégia são mais adequados para resolver a questão. Não há uma solução única para cada inspeção de emergência, por isso quanto mais ferramentas disponíveis, melhor. Alguns crawlers são totalmente submersíveis e possuem classificação de profundidade, o que é importante em cenários em que não há opção a não ser tentar obter visão através da água. Para relatórios de inspeção em conformidade, como o sistema PACP da NASSCO, você não deve realizar inspeções quando o tubo estiver mais de 25% de água. No entanto, no caso de uma emergência, o relatório de inspeção certificado não é o objetivo. O objetivo é resolver o problema em questão, e é aí que ter uma ferramenta totalmente submersível pode ser uma opção útil.

Espaços confinados (pás eólicas, galerias, dutos)
Embora os robôs de inspeção de tubulações tenham sido criados para sistemas de esgoto e tubulações pluviais, eles também têm encontrado utilidade em outras estruturas. A entrada em espaços confinados é uma tarefa perigosa para humanos. Dependendo da estrutura, os seres humanos podem ser expostos a gases perigosos e a áreas pequenas com poucos pontos de saída. Além do risco à segurança, os profissionais que realizam inspeções em espaços confinados são caros e pode ser inconveniente levá-los a uma estrutura específica.
Os Crawlers fornecem um método seguro, fácil de operar e economicamente eficiente para inspecionar essas estruturas. Exemplos incluem pás de turbinas eólicas, galerias e dutos. Túneis escavados por insurgentes foram explorados com robôs de inspeção de tubulações em várias partes do mundo pelas forças de defesa. Os dutos em usinas nucleares podem ter dezenas de metros de comprimento e apenas um ou dois metros de diâmetro. Eles geralmente são quentes e altamente radioativos, o que é mais adequado para a entrada de robôs em vez de seres humanos.
Para tubulações em ambientes de difícil acesso, como em estruturas de captação de barragens, alguns robôs de inspeção de tubulações podem funcionar bem. Nesses casos, robôs portáteis que funcionam com baterias em vez de energia direta são especialmente eficazes. Um exemplo foi um projeto em que o Crawler foi utilizado em tubos de diâmetro de 24 “- 36”, com cerca de 90 metros de comprimento, por um mergulhador a 30 metros de profundidade. O objetivo era avaliar a condição do tubo e inspecionar a comporta no final. Essa aplicação só foi possível com um Crawler com especificações de profundidade.
QUAL É A MELHOR MANEIRA DE GERENCIAR OS DADOS COLETADOS?
Agora que você aprendeu sobre as diferentes tecnologias para coleta de dados de inspeção e os motivos para coletar esses dados, a grande questão é como usar tudo isso? O objetivo da pesquisa desempenha um papel importante na escolha de qual software ou solução de registro de dados é melhor. Existem muitas marcas diferentes de software disponíveis, variando em suas capacidades.
Os principais recursos de software a serem observados são:
– Desejo adicionar notas sobre cada defeito junto com as fotos e vídeos enquanto inspeciono
– Quero que a inspeção seja certificada pela NASSCO
– Desejo inspecionar outras estruturas como bueiros e laterais
– Quero construir um mapa/georreferenciar minhas descobertas
– Quero gerar modelos 3D
– Desejo compartilhar essas informações via nuvem com meu cliente ou do campo para inspetores no escritório
– Desejo usar inteligência artificial (IA) para avaliar a filmagem de inspeção automaticamente em busca de defeitos comuns para ajudar a reduzir o erro humano e acelerar o processo de inspeção
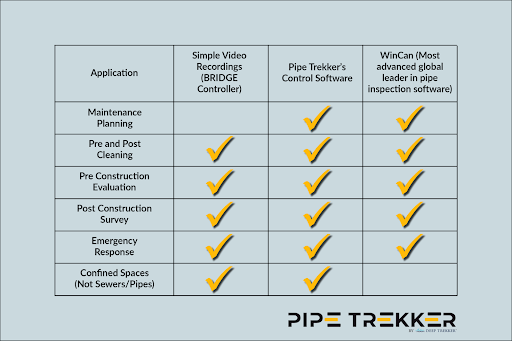
Adicionar anotações e comentários ao longo da inspeção é um recurso de todos os softwares de inspeção que operam a partir de tablets, consoles maiores ou equipamentos montados em caminhões. Em alguns casos, controladores de mão mais portáteis, como a menor opção de controle do Pipe Trekker, simplesmente fornecem um feed de câmera simplificado. A vantagem desta solução é que ela é extremamente fácil para o operador e o processo mais direto. Para levantamentos simples ou levantamentos sem um objetivo de inspeção completa, como um levantamento pós-construção, inspeção de pás de turbinas eólicas ou aplicação em respostas de emergência, esta é a configuração ideal.
Para avaliações completas de I&I e planejamento de manutenção, ou para inspeções sistemáticas como parte de pesquisas de limpeza, é melhor ter a funcionalidade de relatório adicional. As marcas de software que fornecem esse recurso incluem Pipe Trekker, WinCan, CTSpec, SewerAI, ITPipes, POSM, GraniteNet e muito mais. Há vantagens e desvantagens para cada um. O WinCan é líder global e possui a mais ampla gama de ofertas, portanto, este guia se concentrará nele e em seus módulos.
WinCan oferece muitos idiomas diferentes para seu software e seus relatórios em conformidade para programas como NASSCO / PACP. As licenças Advanced e Expert do WinCan incluem integrações para avaliações de bueiros e laterais (LACP/MACP). O pacote Expert do WinCan também possui integrações GIS, com programas como ArcGIS, permitindo recursos de mapeamento. O WinCan possui módulos de laser para ajudar na modelagem 3D e módulos de IA para processos de inspeção simplificados. O WinCan também possui opções de computação em nuvem para equipes que desejam ter seu inspetor principal no escritório.
Recomendamos obter demonstrações das várias opções de software disponíveis para entender o que é melhor para sua organização. Nós nos integramos com a maioria das opções e estamos felizes em ajudar a fornecer recomendações com base nas suas necessidades de negócios.
COMO A PIPE TREKKER PODE AJUDAR EM CADA APLICAÇÃO
– Planejamento de Manutenção (Avaliação de Infiltração e Influxo)
– Vistoria Pré e Pós Limpeza
– Avaliação pré-construção
– Vistoria Pós-Construção / Revestimento / Reabilitação
– Resposta de Emergência (Bloqueios, Desmoronamentos Causados Por Erosão, Grandes Vazamentos)
– Espaços Confinados (Turbinas Eólicas, Galerias Pluviais, Dutos)
O que o Pipe Trekker oferece?
O Pipe Trekker oferece uma variedade de recursos em vários aplicativos. Há algumas perguntas que você pode fazer a si mesmo, além das informações anteriores, para ajudar a encontrar a melhor configuração para suas necessidades.
Qual diâmetro do tubo você deseja inspecionar?
– Menor que 6″ – Considere Push Cameras e Endoscópios/Boroscópios.
– 6” ou maior – A-150 Pipe Crawler
– 8″ ou maior – A-200 Pipe Crawler
– Principalmente 6″-24″ – A-150 Pipe Crawler
– Diâmetros maiores – A-200 Pipe Crawler
Qual distância máxima deseja percorrer em uma tubulação?
– Menos de 30 metros – Uma Push Camera pode funcionar bem
– 30 a 200 metros – A-150 / A-200
– Até 300 metros – A-200
– 300+ metros – Contacte-nos para recomendações especializadas
Quais tipos/materiais de tubo serão inspecionados?
– Concreto, Ferro fundido, PEAD, Tijolo, Madeira – Borracha(padrão)
– Aço Corrugado, Grande Diâmetro – Esteiras(lagarta), Rodas Pneumáticas, Kit Espaçador
– PVC, Argila – Rodas de Metal
O que é mais importante – ser o mais portátil possível ou ter a conveniência de um carretel motorizado?
Os pacotes S para o A-150 e A-200 são os produtos campeões em portabilidade e mobilidade. O carretel do umbilical pesa aproximadamente 23 Kg, dependendo do comprimento, e o controlador portátil é extremamente fácil de operar e leve o suficiente para manusea-lo em uso prolongado. Toda a configuração é operada por bateria, com 4 ou mais horas de funcionamento com uma única carga. A recuperação é fácil com o modo de roda livre ativo nos Crawlers, permitindo que você enrole a corda de volta sem peso.
Para configurações de inspeção mais tradicionais, o uso do carretel motorizado Pipe Trekker torna a recuperação ainda mais fácil, já que o carretel é capaz de trazer de volta o cabo umbilical automaticamente. Essa configuração também ajuda a liberar o umbilical mais facilmente, fornecendo um impulso para o Crawler passar por ambientes difíceis, como lama ou lodo. O carretel também permite a entrega de energia híbrida, o que significa que qualquer um dos Pipe Treker’s A-Series pode ser carregado através do cabo para um tempo de execução infinito.
O pacote X para o A-150 e o A-200 inclui um controlador robusto estilo tablet com uma licença para o software Pipe Trekker Control. Este software de controle permite relatórios e anotações durante a inspeção, para obter dados mais organizados. O tablet também se integra perfeitamente à maioria dos softwares de terceiros.
Outro complemento a ser considerado é a câmera traseira do A-200, que permite aos operadores terem visão da traseira do Crawler, facilitando assim, a recuperação. A câmera traseira no A-200 também é útil para navegar em curvas de 90 graus em tubos ou para garantir que a corda não fique enrolada no Crawler ou obstrua o tubo se não estiver sendo recolhida.
Preocupado com o treinamento? Nossos especialistas em Crawlers podem orientá-lo sobre como operar os sistemas. Também temos uma biblioteca de vídeos de treinamento para apoiá-lo. Os controles intuitivos levam apenas alguns minutos para dominar, mas você pode ter a tranquilidade de saber que há uma equipe aqui para ajuda-lo caso precise.
Entre em contato com nossa equipe de especialistas em robótica para encontrar a opção certa para sua aplicação e orçamento.

")
