
O QUE SÃO INSPEÇÕES DE INFRAESTRUTURAS E TÚNEIS SUBAQUÁTICOS?
Existem muitas estruturas que percorrem nossas cidades que não são vistas pela maioria. Essas estruturas são necessárias para o fornecimento de água potável, escoamento de águas pluviais, água residuais e para instalações de tratamento e captação. Essas estruturas precisam de inspeções para determinar sua viabilidade e condição a longo prazo, possibilitando a tomada de decisões sobre a necessidade de reparo. Reparar essas estruturas não é tão fácil quanto reparar edifícios e estradas, uma vez que estão sob muitas outras estruturas e envolvem muitas partes móveis para realizar esses reparos. As inspeções são realizadas para determinar a condição estrutural, níveis de sedimentos e muito mais. As inspeções podem ser realizadas por mergulhadores, entrada em espaços confinados, escavações ou veículos robóticos.
POR QUE USAR UM ROV PARA INSPEÇÃO DE INFRAESTRUTURA SUBAQUÁTICA?
Para inspeções de dutos e túneis totalmente submersos, um ROV é uma excelente ferramenta. Em alguns ambientes, como quando a água está turva ou o diâmetro do túnel é grande, é difícil contar apenas com uma câmera para realizar uma inspeção completa. A visibilidade limitada pode dificultar a identificação de defeitos. Um operador pode aproximar o ROV das paredes, superior e inferior do túnel para obter uma imagem suficientemente clara, mas isso pode significar várias tentativas e pode não fornecer dados adequados, como a compreensão dos níveis de sedimentos no túnel.
Estes são alguns dos fatores a serem considerados ao escolher um ROV para inspeção de túneis
Comprimento e diâmetro dos túneis
- Diâmetro menor, veículo de menor porte
- Diâmetro maior, mais provável de precisar de sonar de imagem (luzes e câmera sozinhas não fornecerão contexto suficiente para o operador realizar inspeções completas)
- Túneis mais longos podem exigir veículos mais potentes ou sonares de imagem para ajudar a tornar a inspeção mais eficiente
Pontos de acesso
- Tamanho dos pontos de acesso (dimensões do veículo)
- Número de pontos de acesso (comprimento do cabo umbilical necessário)
- Localização dos pontos de acesso (o quão portátil terão que ser os equipamentos)
Condições do túnel
- Níveis de sedimentos (veículos rastreados e veículos submarinos são melhores quando há quantidades significativas de sedimentos acumulados no duto)
- Submerso vs. Parcialmente submerso vs. Vazio (veículo crawler vs. ROV submarino)
Tipo de dados necessários
- Inspeções visuais gerais podem ser feitas com uma câmera simples e iluminação
- Os sonares ajudam a obter uma visão geral em águas turvas
- Dados do medidor de espessura em tubos de aço
- Posição no duto (USBL não funciona, é necessário um contador de distância no carretel)
- Os níveis de sedimentos exigem um sonar
BENEFÍCIOS DE USAR UM ROV COM SONAR PARA INSPEÇÕES DE INFRAESTRUTURA SUBAQUÁTICA
A anexação de um sonar de imagem ao ROV permite que os operadores tenham uma melhor compreensão da condição do túnel como um todo e permite que os seguintes defeitos sejam identificados:
Condição do túnel
- Deformação
- Ovalidade
- Corrosão
Tamanho e tipos de defeitos
- Rachaduras e deformações
- Colapso da estrutura
- Juntas desacopladas
Obstruções
- Níveis de sedimentos podem ocultar deformações, reduzir taxas de fluxo, aumentar o risco de transbordamento
- Objetos estranhos (materiais de construção, enraizamento de árvores, derivações no duto)
Encontrar esses defeitos permite que a tomada de decisão sobre o reparo aconteça. Nem todos os defeitos requerem atenção imediata. Muitas vezes, estes se tornam pontos de interesse para avaliações posteriores. O objetivo é identificar mudanças ao longo do tempo, para ver se um defeito está piorando rapidamente ou lentamente. Se o defeito estiver em um ponto crítico e estiver crescendo em gravidade, as ações de reparo precisam ser imediatas. No entanto, igualmente importante do ponto de vista de custo, ser capaz de restringir quais defeitos não requerem atenção ajuda a reduzir gastos desnecessários com reparos. O benefício de um ROV em sua frota é que a revisão desses defeitos pode ser realizada por praticamente qualquer operador.
ESTUDO DE CASO – PIPETEK
Objetivo
O objetivo desta missão em particular era avaliar a condição de um túnel combinado de esgoto e águas pluviais para a Toronto Water. A PipeTek precisava fornecer um relatório do túnel e das estruturas associadas de bombeamento e admissão para determinar os próximos passos para gerenciar a estrutura. Por se tratar de um túnel totalmente submerso de 530m de comprimento, o ROV REVOLUTION foi escolhido para a tarefa. Túneis mais longos com sedimentos no fundo provaram ser mais difíceis para os Crawlers, robôs com os quais a PipeTek tinha significativamente mais experiência na época.
O problema dos Crawlers é que suas rodas ou esteiras agitam o sedimento, obstruindo a visão do túnel. Eles também têm um alcance de visão mais curto, porque suas câmeras só podem se aproximar até certo ponto do fundo. A entrada humana neste longo túnel seria muito perigosa. Ao utilizar um ROV submarino com um sonar de imagem, a PipeTek conseguiu capturar um relatório completo desses túneis e estruturas.
Equipamento utilizado
Deep Trekker REVOLUTION ROV
- O REVOLUTION ROV é um drone subaquático, que quando equipado com um dispositivo de sonar, permite que os operadores vejam mesmo que a água esteja tão turva que a câmera seja inútil. O sonar permitiu que os operadores visualizassem o ambiente ao seu redor de uma maneira muito mais completa do que com a varredura lateral tradicional ou até mesmo um sonar de varredura mecânica.
Sonar de imagem multifeixe Blueprint Subsea Oculus M3000d
- O “d” no nome do modelo de sonar M3000d significa que é um sonar de dupla frequência, para que você possa alternar entre o modo de baixa frequência, alta frequência, alta resolução e a visão de ângulo mais amplo, que é o modo de baixa frequência . O modo de baixa frequência oferece maior alcance e campo de visão amplo para uma visão geral do túnel. O modo de alta frequência é indicado para inspeções de perto, sendo melhor para reconhecer defeitos e para medições precisas. Alternar entre os dois modos é apenas pressionar um único botão. Nesta inspeção, houve varias passagens pelo túnel, ambas em velocidades mais altas para se ter uma rápida ideia da condição, procurando grandes artefatos ou obstruções. O mais lento passa em alta frequência e alta resolução para focar em defeitos menores.
INTERPRETANDO IMAGENS DE SONAR
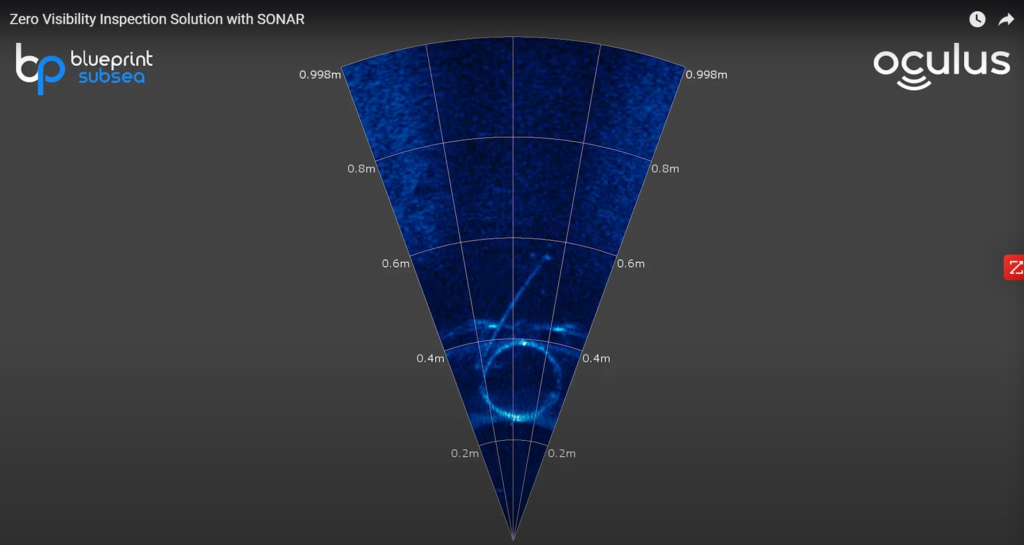
O ROV REVOLUTION tem a função exclusiva da cabeça rotativa da câmera que também gira o sonar. Conforme você gira sua câmera para cima e para baixo, esse sonar também gira para cima e para baixo. Nesta imagem, a câmera está apontada diretamente para baixo em 90 graus negativos.
O feixe do sonar de 20 graus é espalhado ao longo da parede em frente ao ROV. O “bico” do ROV está encostado na parede e, portanto, você está vendo a textura dessa parede como se alguém estivesse apontando uma lanterna diretamente para baixo. Quando você aponta o sonar para cima e para a direita na borda do túnel, você pode ver a corda e um pouco de sua sombra, bem como aquelas bolhas saindo da boca do túnel. Traga o sonar de volta a zero graus nesse ângulo, e você terá uma seção transversal das paredes que estão ao redor do ROV. Incline-o um pouco para cima, você verá o teto do túnel na frente do ROV. Se você passar dos 90 graus, poderá ver bem na borda do eixo.
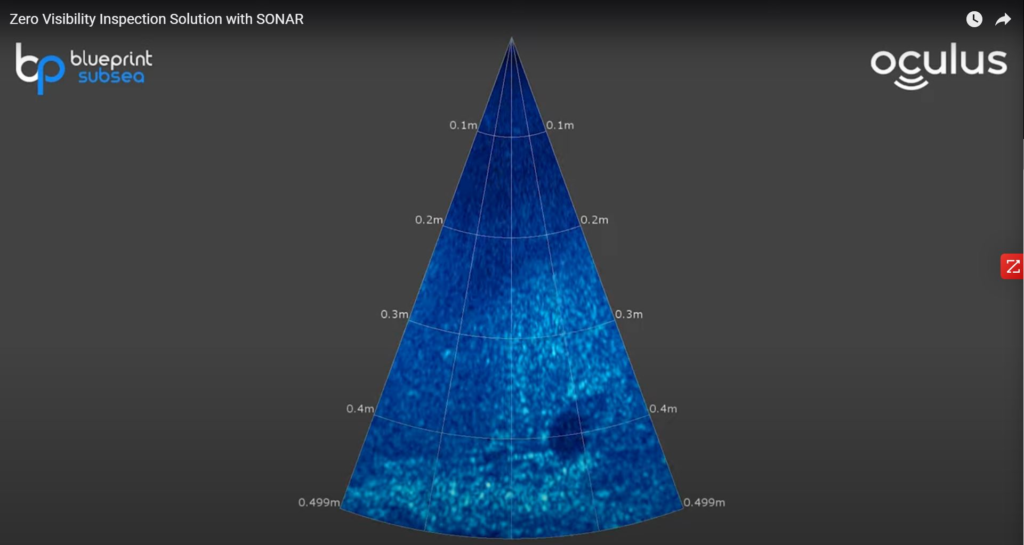
Observando pequenos artefatos (bolhas) com o sonar de imagem
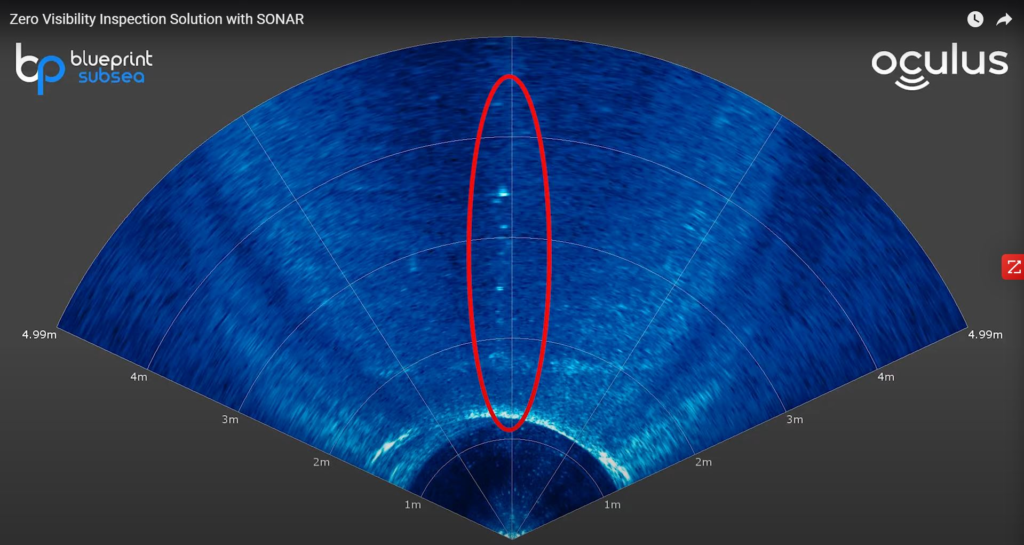
Agora, a outra coisa que é interessante com o sonar rotativo é que você pode apontar o sonar ligeiramente para baixo e ver o fundo desse túnel. Infelizmente ele está coberto de sedimentos, então isso não deu aos operadores uma boa ideia da estrutura. Nesta inspeção, eles se concentraram na parte superior. Você pode ver que há duas linhas dentro do túnel são as bordas dessa camada de sedimentos. À medida que avançamos olhando para o teto do túnel, você pode identificar rachaduras onde há um pouco de sombra projetada, então significa que há algo elevado e eles descobriram que tinham muitas rachaduras.
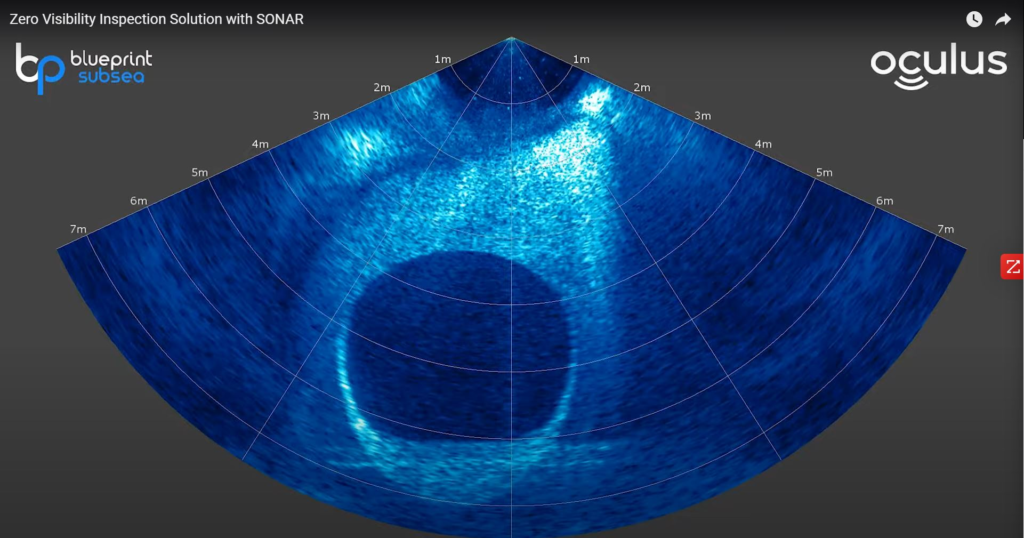
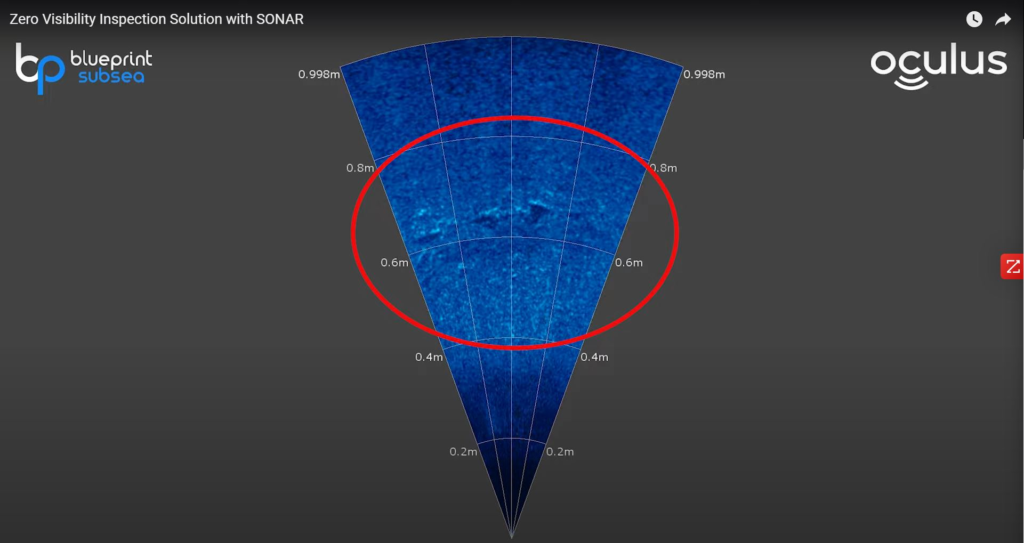
Usando o sonar de imagem para obter a seção transversal do tubo e ver os níveis de sedimentos
Outra aplicação interessante é que você pode apontar este sonar diretamente para baixo, como você viu anteriormente. Mas como está dentro de uma estrutura circular, eles estão obtendo uma seção transversal do túnel. Essa linha na parte inferior do circulo, cortando o que você esperaria ser um círculo perfeito, é a superfície do sedimento. A partir daí, você pode fazer medições regulares de profundidade dos sedimentos acumulados enquanto dirige pelo túnel.
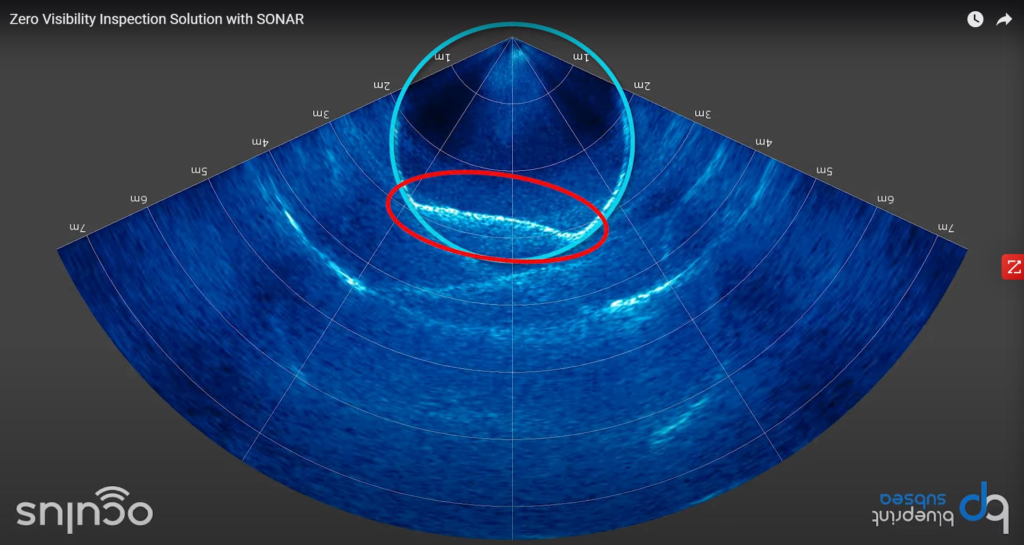
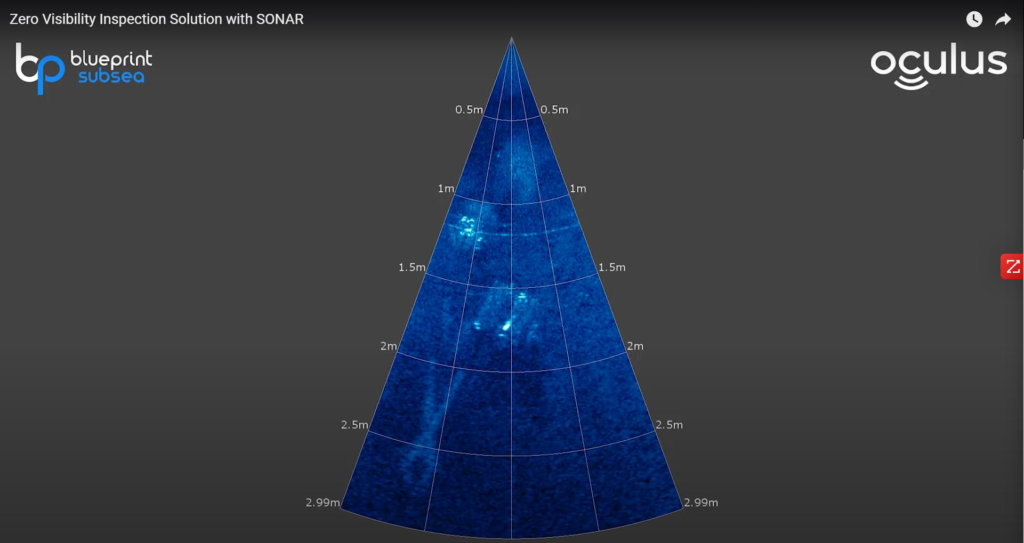
Identificando uma protuberância lateral no túnel
Outro exemplo de uma estrutura interessante que foi encontrada é retratado na imagem acima. Incline o sonar para cima e verá que há uma longa sombra. Sempre que você vê uma longa sombra, isso significa que o objeto é alto. Há algo se projetando para baixo do teto do túnel. Ao manobrar o ROV e a cabeça do sonar, você pode obter uma visão melhor de diferentes ângulos. Conforme eles se aproximam e ajustam levemente o ângulo, você pode ver que há um objeto cilíndrico. Este é um tubo lateral que se projeta no teto do túnel. Você pode ver que há um pouco de detritos saindo do final dela, então eles marcam a localização dessa lateral.
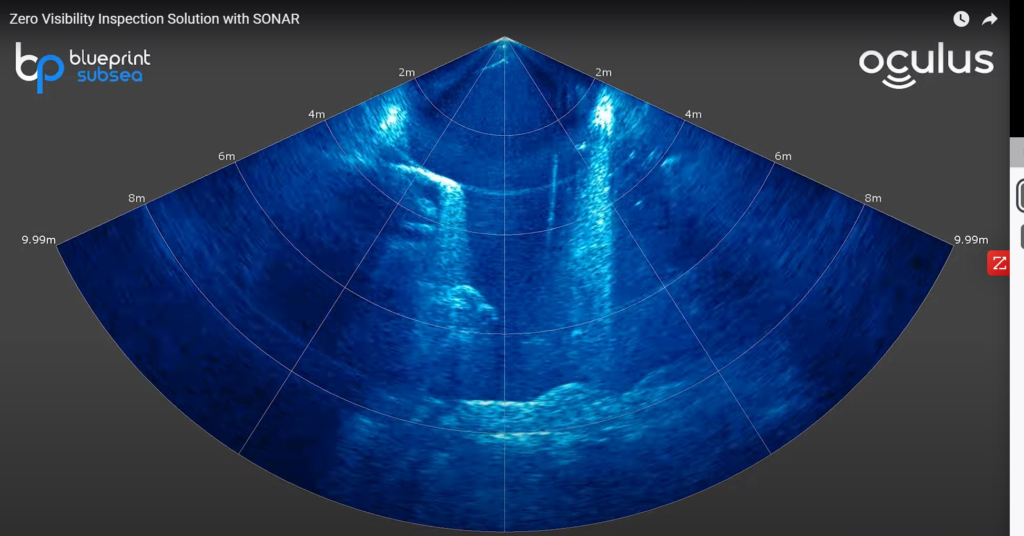
Identificando pequenos defeitos
Curiosamente, foi o único caso identificado neste túnel de 530 metros de comprimento. Ao girar de um lado para o outro, você consegue ter uma visão um pouco melhor de sua forma. Ao usar o software do sonar ao vivo durante a inspeção ou após a inspeção ao revisar, você pode usar a ferramenta de régua para medir esses defeitos. Quando surgiram na outra extremidade de um desses túneis, estavam na base de um grande reservatório que coleta água para não haver escoamento excessivo. Tinham três bombas nesta seção, à direita, algumas dessas estruturas verticais com o material mais espesso na parte inferior. Usando o sonar, os operadores não apenas conseguem ver a estrutura geral em busca de obstruções ou detritos, mas também podem ter uma noção da textura da parede, identificando rachaduras óbvias ou estruturas desmoronando. Mesmo com o sonar definido para alcance de 10 m, você pode ver detalhes nítidos a 50 cm da cabeça do sonar. Ter esses recursos visuais também é útil para ter consciência posicional perto das bombas, entendendo até onde seriam os limites para evitar emaranhados e danos no cabo umbilical.
Escaneando estruturas complexas
DICAS DE OPERAÇÃO
Nesses ambientes, é melhor definir a potência no baixo/mínimo, mover-se lentamente e girar o sonar para ter uma visão melhor do ambiente. Uma abordagem calma e cuidadosa não apenas evitará emaranhamento do cabo umbilical, que são realmente apenas uma preocupação perto de estruturas complexas como uma bomba, mas também produzirá imagens de sonar mais claras. Isso é especialmente importante se outras partes interessadas estiverem visualizando a inspeção posteriormente, pois será mais fácil adicionar notas e entender o que foi inspecionado.
Usando o Sonar para medição
Nesta gravação, eles fizeram uma órbita voltada para fora com o sonar apontando para baixo, procurando por imperfeições nas paredes. Você pode ver um local de vazamento na imagem. Então eles se aproximam, tiram algumas medidas de sua localização e tamanho. Uma última parte desta pesquisa envolveu o uso do ROV para ajudar na recuperação de um scanner montado em tripé. O tripé quebrou e o scanner caiu no fundo do poço. A garra no ROV normalmente é capaz de auxiliar na recuperação de ferramentas, mas o peso elevado desse scanner combinado com a forma lisa do seu exterior dificultou a aderência com a garra. Outros objetos, sejam vítimas de afogamento, lajes de concreto ou mesmo e-scooters, provaram ser alvos perfeitos para as garras da Deep Trekker recuperarem.
Recuperando equipamentos perdidos usando o Sonar de imagem e uma garra
Uma garra grande na extremidade de duas cordas foi usada para recuperá-lo. Quando eles puxam uma corda, a garra se fecha em torno de um objeto e você puxa a outra para recuperar o alvo. O ROV com o sonar posicionado perto do alvo foi capaz de monitorar esse processo e ajudar com onde e quando fechar a grande garra.
RESUMO DA MISSÃO
No geral, esta pesquisa foi um sucesso total, apesar de ter visibilidade zero para a câmera. Usando o sonar de imagem combinado com a flexibilidade da cabeça rotativa da câmera no REVOLUTION, a PipeTek foi capaz de identificar vários pontos de interesse para a Toronto Water avaliar e planejar uma novas inspeções, como laterais salientes, poços, rachaduras e níveis de sedimentos. Esses pontos de interesse não foram apenas localizados e fotografados, eles também puderam medi-los com as ferramentas de sonar disponíveis.
ROVs DEEP TREKKER PARA INSPEÇÕES DE TÚNEL E INFRAESTRUTURA
Sonares de imagem são uma opção extremamente versátil e capaz para muitas aplicações diferentes, não apenas inspeções de túneis. Eles são frequentemente referidos como o sensor mais importante em um ROV pelos pilotos de ROV. Os sonares de imagem Blueprint Subsea são uma excelente ferramenta para inspeções de túneis, mas não são a única opção. Vimos os Imagenex 831L Pipe Profilers e sonares de varredura mecânica usados para fornecer dados valiosos de inspeção de túneis também. Esses sonares de varredura não fornecem o nível de detalhe necessário para tomar decisões de avaliação de condição em pequenos defeitos, mas são excelentes ferramentas para determinar a condição geral dos tubos, coleta de dados sobre ovalidade, níveis de sedimentos e identificação de grandes defeitos.
Usar esse tipo de tecnologia pode parecer assustador no começo, mas fica mais fácil com a pratica. A parte mais importante é determinar a ferramenta certa para cada projeto, possibilitando atingir o objetivo final da inspeção.
Se precisar de ajuda para encontrar a tecnologia certa para suas missões, entre em contato com nossa equipe de especialistas em robótica para encontrar a opção certa para suas aplicações e orçamento.

")
