
O QUE É BUSCA E RESGATE?
Busca e Resgate (SAR) é uma operação executada por serviços de emergência bem treinados e especializados para localizar e extrair um indivíduo que se acredita estar em perigo iminente em uma área remota ou de difícil acesso, como montanhas, deserto ou floresta, lagos ou mar. A busca e resgate difere da busca e recuperação, pois a SAR é usada apenas quando há uma chance de salvar uma vida. Quando se conclui que o resgate da pessoa desaparecida pode não ter mais êxito, a missão entra no modo de recuperação, pois mesmo com esforço total, o resgate não é mais garantido.
A busca e recuperação subaquática especificamente é o processo de localização e recuperação de vítimas ou objetos perdidos debaixo d’água por mergulhadores, veículos operados remotamente e/ou equipamentos eletrônicos em embarcações de superfície.
MÉTODOS DE BUSCA E RESGATE
As equipes de busca e recuperação precisam encontrar seu alvo de maneira rápida e segura. Seja procurando uma vítima perdida, veículo ou outra evidência, é imperativo que as investigações sejam conduzidas do modo mais eficiente possível.As equipes de recuperação normalmente planejam sua área de busca usando o último local conhecido e relatórios de testemunhas oculares. Uma vez determinada a área de busca, as equipes de busca e salvamento varrem a área a procura do alvo.
Seja usando um sonar de varredura lateral em seu barco ou veículo operado remotamente (ROV) equipado com sonar , os padrões de busca são importantes para uma varredura completa. Existem muitos padrões usados para garantir que estão pesquisando completamente uma área – sem perder nenhum ponto-chave. O uso de um padrão permite que a equipe rastreie com precisão onde eles pesquisaram e não pesquisaram.
Uma vez que o alvo tenha sido identificado, as equipes podem recuperar com segurança e respeito a vítima ou as provas. Usando um ROV, mergulhadores ou uma combinação de ambos, a equipe pode concluir a recuperação.
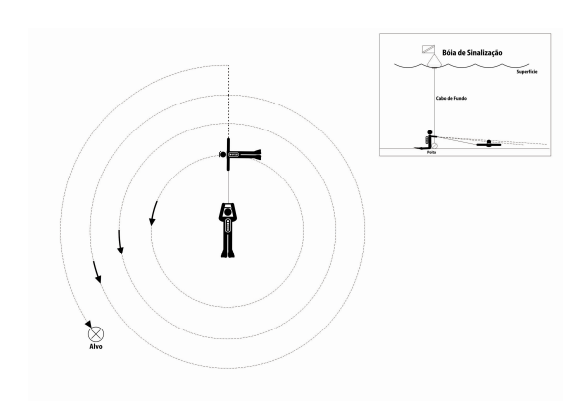
MÉTODO DE BUSCA CIRCULAR
Um padrão de pesquisa comum é o método de busca circular. Relativamente simples e direto, consiste em um mergulhador ou ROV nadando em uma série de círculos, aumentando gradualmente a circunferência, em torno de um ponto de referência fixo que marca o centro da área de busca. Exigindo pouco equipamento extra, é melhor para buscas onde a área do alvo é conhecida com relativa precisão.
O centro da área de busca deve ser claramente marcado por um objeto fixo e altamente visível. O raio dos círculos depende fortemente da visibilidade e das condições subaquáticas. Deve haver uma pequena sobreposição entre o círculo atual e o círculo anterior para evitar o risco de errar o alvo. Se um mergulhador estiver conduzindo a busca, é útil anexar uma linha de distância ao ponto central fixo, desenrolando gradualmente as seções da linha após cada círculo. Se um ROV estiver sendo usado, o software de planejamento de missão pode ser usado para rastrear quais áreas foram pesquisadas anteriormente.
Se o alvo não for encontrado no momento em que a busca do círculo for concluída, a equipe pode mudar o ponto central e começar novamente.
Variações no Método de Busca Circular
O método de busca circular é semelhante ao método de busca em espiral, no entanto, o espiral é geralmente concluído sem um ponto de marcação central. Em vez do ponto fixo e da linha, as distâncias são frequentemente medidas usando a quantidade de “pernadas” do mergulhador ou distâncias de rastreamento cobertas na tela do ROV. Embora o método de busca em espiral não exija um ponto fixo, e como resultado não seja suscetível ao emaranhamento de linhas por detritos subaquáticos, ele pode ser menos preciso.
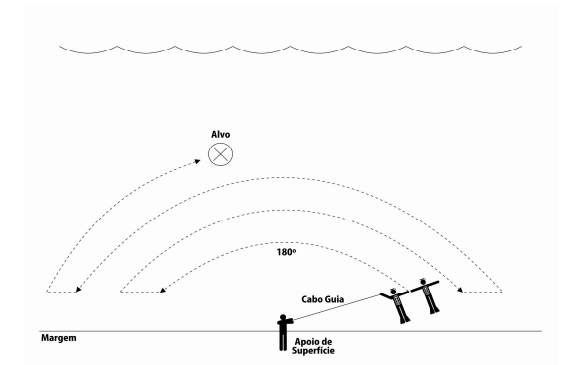
Outra variação do método de busca circular é a busca semicircular, também conhecida como busca em arco.
Frequentemente usado quando não há espaço suficiente para completar um círculo completo, o mergulhador ou ROV para e muda de direção no final de cada arco. Essa variação é frequentemente usada quando a área de busca está ao longo de uma costa ou doca onde um círculo completo não pode ser concluído.
Vantagens
- Muito simples e direto de conduzir em emergências.
- Pouco equipamento é necessário para conduzir com precisão um padrão de busca circular.
- Se estiver usando um mergulhador, não é necessária nenhuma referência na superfície para guiar o mergulhador pela área.
Desvantagens
- Embora seja necessária uma quantidade mínima de equipamento para uma busca circular, o ponto de ancoragem deve se mover livremente para evitar emaranhamento. Além disso, troncos, rochas, plantas e outros detritos submersos podem emaranhar a linha se a busca for executada com um mergulhador.
- É difícil trocar os mergulhadores durante a condução deste padrão. Se um mergulhador for trocado, muitas vezes é necessário que parte do círculo anterior seja sobreposta.
ESQUADRINHAMENTO COM OU SEM APOIO DE SUPERFÍCIE (JACKSTAY)
Esquadrinhamento com ou sem apoio de superfície, também conhecido como jackstay, é uma linha entre dois pontos fixos ou âncoras usado para guiar mergulhadores e/ou ROVs. Em outras circunstâncias, é usado para guiar mergulhadores comerciais para seus locais de trabalho subaquáticos ou para apoiar o transporte de materiais e equipamentos para o local.
Para realizar uma busca usando o método jackstay, os mergulhadores começam em uma âncora e pesquisam ao longo da linha até chegarem à segunda âncora. Nesse ponto, o segundo ponto de ancoragem é movido lateralmente para mover a linha. A distância que o ponto fixo é movido depende das condições subaquáticas, turbidez e tamanho do alvo. Quando a âncora é movida, o mergulhador muda de direção e procura a área enquanto segue a linha de volta à âncora inicial. Esse padrão continua até que a área seja completamente pesquisada.
Variações do método de busca Jackstay
Se o corpo de água que está sendo pesquisado for relativamente pequeno ou raso, o jackstay pode ser movido pela equipe de superfície em oposição ao mergulhador. Ao levantar e mover toda a linha paralela à posição original, a equipe de superfície pode efetivamente mover a linha para o mergulhador.
Outro método, também conhecido como busca em J, envolve o mergulhador ou ROV começando sempre no mesmo final da linha de busca. Uma vez que a varredura da linha tenha sido concluída, a mesma extremidade do jackstay é reiniciada todas às vezes para que, ao final da varredura, a linha fique paralela à sua posição original. Este método leva mais tempo para ser concluído, mas é útil em visibilidade extremamente limitada ou em casos em que o alvo é muito pequeno, pois a mesma área é pesquisada duas vezes enquanto o mergulhador ou ROV nada de volta na linha.
Vantagens
- Preciso, pois há uma grande quantidade de sobreposição entre cada varredura.
- Fácil trocar de mergulhador no meio da busca sem ter que voltar atrás.
- Útil em grandes ambientes de águas abertas.
Desvantagens
- Requer uma quantidade substancial de equipamentos para configurar de forma eficaz.
- Pode ser confuso de implementar, especialmente com mergulhadores de resgate mais inexperientes – pode exigir um treinamento mais avançado.
- Embora completo e preciso, pode ser demorado.
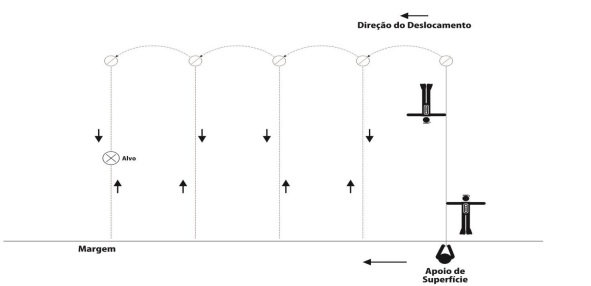
MÉTODO DE PESQUISA DE GRADE
Para conduzir o método de pesquisa em grade, as equipes devem criar uma grade na área de busca. Usando boias de marcação, as equipes criam quadrados de busca cobrindo a área a ser pesquisada. Assim como os métodos anteriores, o tamanho dos quadrados de pesquisa depende da visibilidade e do tamanho do alvo. Depois que os quadrados são criados, cada seção é pesquisada minuciosamente. Após a conclusão, os pesquisadores relatam e registram qualquer coisa de interesse. Isso é repetido em todos os quadrados.
Vantagens do método de pesquisa em grade
- Muito preciso e completo.
- Bem-sucedido – principalmente para alvos menores.
- Um grande número de mergulhadores pode ser despachado sem confusão.
Desvantagens do método de pesquisa de grade
- Embora extremamente preciso, é demorado.
- Complicado e requer mergulhadores altamente treinados.
- Requer uma grande quantidade de equipamentos.

MÉTODO DE PESQUISA DE SNAG-LINE
É um bom método para alvos grandes em uma área relativamente pequena. Quando o tamanho e a forma do alvo são adequados, é uma maneira rápida de encontrar um objeto.
Com um cabo preso tensionado – normalmente por um suporte fixo – um mergulhador, equipe de mergulhadores ou ROV puxa o cabo pelo fundo. Mais comumente, a linha é puxada em um movimento de arco em torno do ponto fixo até enganchar e prender em um objeto. Nesse ponto, a linha é fixada na posição e o mergulhador ou ROV nada ao longo da linha até alcançar o objeto preso. Se o alvo for identificado como objeto da busca, eles o marcarão, caso contrário, liberam a corda para continuar a varredura.
Vantagens do método Snag-Line
- Muito eficaz para alvos grandes, como carros, barcos e aeronaves afundados.
- É extremamente rápido.
- Não requer muitos equipamento.
Desvantagens do método Snag-Line
- Eficaz para objetos maiores, mas não é útil para alvos menores.
- Pode ser destrutivo para o fundo do oceano ou para o leito do lago.
- Objetos grandes podem ficar presos involuntariamente na linha, diminuindo a velocidade do método de Snag-line.
- O objeto tem que ser uma forma adequada para ficar preso pela linha.
MÉTODO DE PESQUISA RÁPIDA
Uma busca rápida é a busca realizada pelos primeiros mergulhadores que chegam, e se baseia no princípio de que uma vítima será encontrada em um raio igual à profundidade da água. Feito especialmente quando a última localização conhecida de uma vítima é perto de uma costa, barco, doca ou píer, o método de busca rápida é normalmente realizado pelos dois primeiros mergulhadores à medida que outros membros da equipe começam a instalar equipamentos adicionais.
Para conduzir o método de busca rápida, um mergulhador atua como o auxiliar enquanto o segundo mergulhador entra na água no último local conhecido da vítima. A partir daí, nada em arco, mantendo-se esticado a linha mantida pelo outro. À medida que o mergulhador procura para frente e para trás em um raio decrescente até a costa, píer, doca ou barco, o bote mantém a linha esticada. Este método pode ser conduzido de forma semelhante com um ROV – como substituto do mergulhador. Isto é particularmente útil em águas perigosas.
Vantagens do Método de Pesquisa Rápida
- Bom para encontrar vítimas rapidamente perto de uma costa, cais ou doca.
- Equipamento limitado é necessário para conduzir o método de busca rápida.
- Os mergulhadores podem começar em minutos, com configuração mínima.
Desvantagens do método de pesquisa rápida
- É mais útil apenas quando o alvo desapareceu recentemente e próximo à costa, píer, doca, etc.

DESCUBRA COMO A DEEP TREKKER PODE REVOLUCIONAR A PESQUISA SUBAQUÁTICA
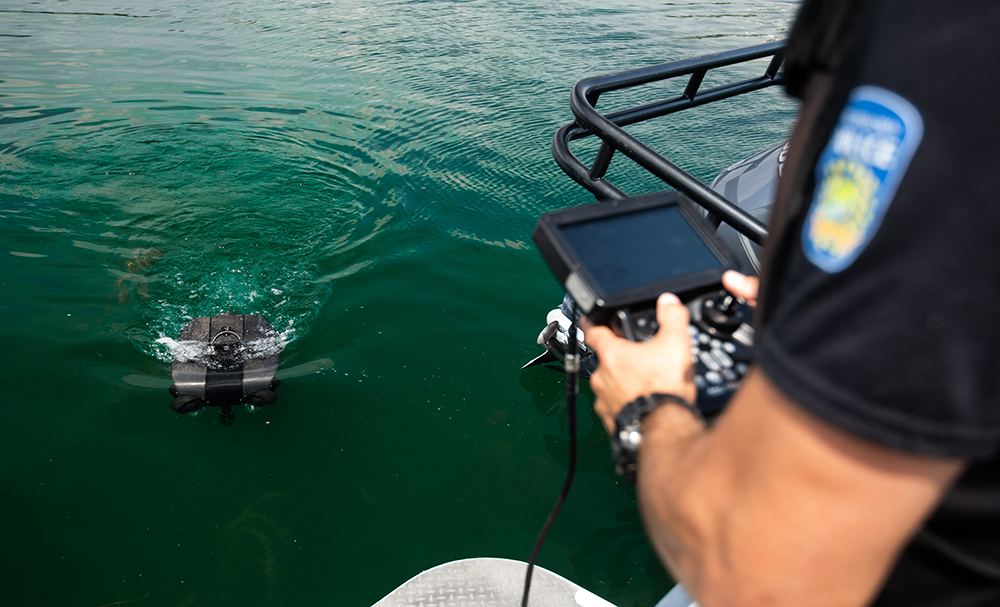
ROVs fornecem às equipes de busca e recuperação uma ferramenta segura e eficaz para busca submarina.
Especializado na identificação de alvos, recuperação de vítimas e evidências e resposta rápida à busca, um ROV Deep Trekker aprimora e auxilia as equipes de busca e recuperação. Opções de sonar permitem que as equipes encontrem alvos debaixo d’água mesmo em águas turvas.
O Deep Trekker oferece três drones subaquáticos, o DTG3, o REVOLUTION e o PIVOT. Todos os três veículos oferecem aos operadores uma maneira conveniente e direta de colocar os olhos debaixo d’água. Projetados para facilitar a portabilidade para locais remotos, todos os três veículos são operados por bateria para que os usuários não precisem carregar fontes de energia para locais de recuperação.
Como sempre, nossa equipe de profissionais do setor está aqui para responder a quaisquer perguntas que você possa ter. Se está pronto para adquirir um veículo próprio, você pode obter sua cotação personalizada hoje.

")
