
Quando são realizadas inspeções no ambiente marítimo, os desafios que impedem a eficiência e implicam custos significativos têm marcado o status quo há muito tempo. As inspeções de rotina de navios são vitais para manter a integridade operacional, otimizar a eficiência do combustível e garantir a segurança subaquática. Essas inspeções têm tradicionalmente dependido de mergulhadores ou de métodos de docagem seca, ambos inerentemente dispendiosos e demorados.
O surgimento de veículos operados remotamente (ROV) promete uma alternativa mais acessível e econômica, mas a sua utilização tem sido dificultada pelo problema perene da navegação sob os cascos dos navios.
Este artigo fornece uma exploração abrangente da estimativa de localização (em inglês, Dead Reckoning) e do trabalho seminal realizado pela parceira da Orion, Deep Trekker, na tecnologia de mini ROV, com ênfase particular em seu potencial para transformar as inspeções rotineiras de embarcações. O foco está em destacar as implicações para a eficiência de combustível, detecção de defeitos e otimização econômica da manutenção de embarcações.
Este avanço inovador foi alcançado pelo trabalho pioneiro da Deep Trekker na tecnologia de estimativa de localização. Estas últimas conquistas têm o potencial de avançar nas inspeções submarinas de embarcações, fornecendo uma solução prática para o desafio de longa data da navegação subaquática.
Aplicações de estimativa de localização com Robótica Subaquática
Além das inspeções de casco, a estimativa de localização encontra ampla aplicação no campo da robótica subaquática. Nela, veículos autônomos e ROVs navegam em ambientes subaquáticos complexos para diversas tarefas. Isto inclui pesquisa oceanográfica, levantamentos subaquáticos, manutenção de dutos e busca e recuperação, para citar alguns.
Na pesquisa oceanográfica, os ROVs equipados com sistemas estimativa de localização podem coletar dados sobre correntes oceânicas, gradientes de temperatura, qualidade da água e distribuição da vida marinha. Ao atualizar continuamente as suas posições através de cálculos de estimativa de localização, os ROVs podem executar padrões de pesquisa predefinidos. Isto permite aos cientistas estudarem a dinâmica dos oceanos e a saúde dos ecossistemas.
Da mesma forma, em inspeções subaquáticas e operações de manutenção, os ROVs contam com a estimativa de localização para navegar em estruturas subaquáticas complexas. São espaços como plataformas de petróleo offshore e tubulações submersas. Ao estimar com precisão suas posições em relação aos objetos alvo, os ROVs podem realizar tarefas como inspeções visuais, reparos estruturais e instalações de equipamentos com o mínimo de intervenção humana.
A estimativa de localicação também desempenha um papel vital em missões de busca e recuperação (SAR), onde decisões urgentes dependem de informações posicionais precisas. Os ROVs Deep Trekker equipados com sistemas estimativa de localização podem cobrir sistematicamente grandes áreas de busca. Isso estreita o raio de busca com base em posições calculadas e feedback do sensor.
No geral, a integração da estimativa de localização com a robótica subaquática facilita uma navegação mais eficaz em ambientes subaquáticos desafiadores, permitindo uma ampla gama de aplicações científicas, comerciais, industriais e humanitárias.
A importância da estimativa de localização nas inspeções marítimas
A estimativa de localização é um componente chave nas operações marítimas, especialmente em inspeções subaquáticas. Isso porque este é um meio fundamental de rastreamento da posição e movimento de equipamentos de inspeção em ambientes subaquáticos, como os ROVs. Isso permite que os inspetores naveguem, rastreiem e coletem dados com precisão em ambientes subaquáticos desafiadores.
Quando combinado com outros auxílios e sensores à navegação, a estimativa de localização contribui positivamente. A segurança, eficiência e eficácia das inspeções marítimas garante que estas cumpram os objetivos pretendidos.
Aqui estão alguns pontos-chave que destacam a importância da estimativa de localização nas operações marítimas:
Navegando de baixo d’água sem GPS ou recursos eletrônicos
A estimativa de localização oferece uma alternativa valiosa para navegação em ambientes onde o GPS é negado, como em regiões subaquáticas, onde sinais de GPS podem ser obstruídos ou bloqueados. Em cenários de inspeção subaquática, os sinais GPS não estão disponíveis ou não são confiáveis devido à atenuação dos sinais de satélite pela água. A estimativa de localização fornece dados de posição quando esses sistemas não estão disponíveis. Isso permite uma navegação precisa sem a assistência de GPS ou óptica em ambientes subaquáticos.
Ao aproveitar uma combinação de sensores inerciais, giroscópios, acelerômetros e algoritmos sofisticados, a estimativa de localização permite que os operadores de ROV mantenham uma consciência espacial precisa e naveguem com confiança, independentemente da disponibilidade do GPS.
Os operadores podem confiar nos dados de posição da estimativa de localização para guiar o ROV ao longo de rotas predeterminadas. Além disso, eles podem realizar inspeções completas, tudo sem a necessidade de GPS ou assistência óptica.
Maximizando a eficiência da inspeção com rastreamento de posição
A estimativa de localização permite que os inspetores estimem continuamente a posição dos ROVs Deep Trekker à medida que eles se movem debaixo d’água durante as inspeções. Esta informação é fundamental para garantir que a inspeção abrange a área pretendida. Quando você sabe onde está, sabe onde já inspecionou e sabe para onde precisa ir em seguida. Até agora, não existia um método eficaz para rastreamento de posição de ROVs subaquáticos perto de navios.
Ao integrar vários sensores e algoritmos, a estimativa de localização fornece feedback em tempo real sobre a localização do ROV, permitindo que os inspetores mantenham o controle. Ao empregar essa tecnologia, os inspetores podem monitorar a posição do ROV em relação a pontos de referência predefinidos ou trajetórias planejadas. Isso garante que a inspeção permaneça no curso e cubra todas as áreas visadas de forma eficaz.
“O rastreamento de posição em tempo real permite que os inspetores se adaptem às mudanças nas condições subaquáticas ou a obstáculos inesperados, permitindo ajustes dinâmicos na estratégia de inspeção conforme necessário”.
Ao manter uma consciência espacial precisa durante todo o processo de inspeção, os inspetores podem avaliar os ativos subaquáticos, identificar possíveis problemas e tomar decisões informadas para otimizar as atividades de manutenção e reparo.
Melhorando a segurança subaquática
Ao trabalhar debaixo d’água, a segurança é uma preocupação primordial, tanto para os operadores de ROV quanto para qualquer mergulhador que os acompanhe –, e conhecer a localização do ROV e dos mergulhadores é essencial para a segurança.
A estimativa de localização ajuda os inspetores a garantirem que os ROVs ou mergulhadores não se desviem para áreas perigosas, como estruturas subaquáticas, naufrágios ou áreas com fortes correntes. Ao utilizar a estimativa de localização para rastrear a localização precisa dos ROVs em relação às estruturas e correntes subaquáticas, riscos potenciais podem ser identificados e evitados, minimizando a probabilidade de acidentes ou danos ao equipamento.
Otimizando estratégias de manutenção por meio de insights baseados em dados
Dados posicionais precisos obtidos através da estimativa de localização melhoram a qualidade dos dados de inspeção, permitindo que os inspetores naveguem nos ROVs para áreas de interesse específicas. Esta abordagem direcionada garante que as inspeções se concentram nas áreas mais importantes, reduzindo a possibilidade de falta de detalhes essenciais e melhorando a precisão dos dados.
Isto inclui dados como a localização de estruturas subaquáticas, defeitos ou anomalias, que devem ser registados com precisão para uma análise eficaz. Dados de maior qualidade podem levar a uma tomada de decisões mais informada, reduzindo potencialmente a necessidade de inspeções de acompanhamento que consomem combustível e recursos adicionais.
Os dados coletados pelos ROVs que utilizam a tecnologia estimativa de localização fornecem informações valiosas que podem otimizar as estratégias de manutenção da embarcação. Ao documentar com precisão as condições do casco e identificar áreas que requerem atenção, os ROVs permitem que as equipes de manutenção priorizem reparos, programem operações de limpeza e implementem medidas de manutenção proativas.
Esta abordagem orientada por dados minimiza o tempo de inatividade, reduz os custos operacionais e prolonga a vida útil das embarcações, elevando, em última análise, o nível de eficiência operacional e rentabilidade.
Eficiência de Combustível e Gestão de Recursos
A estimativa de localização auxilia no gerenciamento eficiente de recursos, ajudando os inspetores a monitorarem o andamento das inspeções, e também aos ROVs a identificar os momentos ideais para limpar o navio. Assim, pode-se garantir que o casco permaneça livre de bioincrustações. Inspeções regulares e a manutenção do casco, livre de crescimento marinho, podem melhorar drasticamente a eficiência do combustível nas operações marítimas, reduzindo potencialmente a eficiência em até 40% ao criar arrasto na superfície irregular.
Minimizar o consumo de combustível não só poupa dinheiro, mas também reduz o impacto ambiental das operações marítimas. A estimativa de localização, ao garantir cronogramas de manutenção eficientes, contribui para os esforços de sustentabilidade ao reduzir as emissões associadas à queima de combustível.
Integração de estimativa de localização com Tecnologias Avançadas de Sensores
Os desenvolvedores frequentemente integram a tecnologia de estimativa de localização com tecnologias avançadas de sensores para aprimorar ainda mais as capacidades dos ROVs durante as inspeções de embarcações. Os inovadores algoritmos Sensor Fusion da Deep Trekker são um ótimo exemplo disso.
Sensores como sistemas de posicionamento acústico, sonares de imagem e câmeras de mapeamento 3D complementam o de estimativa de localização. Assim, a consciência espacial e os dados ambientais adicionais serão fornecidos.
Esta integração permite que os ROVs naveguem em ambientes subaquáticos complexos de forma mais eficaz e capturem dados de inspeção abrangentes para análise completa e tomada de decisões.
Como a estimativa de localização se aplica aos ROVs Deep Trekker e às inspeções subaquáticas
A estimativa de localização permite uma melhor consciência posicional e precisão dos dados, melhorando a segurança e a eficiência nas operações marítimas. Isto contribui para rotas otimizadas, redução do consumo de combustível e economia de custos, ao mesmo tempo que se alinha com os objetivos de sustentabilidade ambiental.
Você pode realizar este tipo de rastreamento usando apenas sensores no veículo, sem precisar de uma configuração USBL. Isto cria oportunidades de navegação em ambientes onde um USBL é menos eficaz, como espaços com reflexos de superfície, interferência de rede ou sombreamento.
Vamos dar uma olhada em como estimativa de localização se aplica aos ROVs Deep Trekker e inspeções subaquática:
Posição inicial e dados: O processo começa quando determinamos a posição inicial do ROV, geralmente usando GPS ou outros sistemas de navegação antes de submergi-lo. Além disso, são coletados dados sobre a velocidade do veículo, direção e outros parâmetros relevantes.
Estimando a nova posição: Usando essas informações iniciais, o ROV pode estimar sua nova posição integrando suas informações de velocidade e direção ao longo do tempo. Essencialmente, ele rastreia a distância percorrida em cada direção (norte, leste, profundidade) com base na velocidade e na direção do movimento. O software integrado do ROV atualiza continuamente esta posição estimada à medida que ele se move.
Acúmulo de erros: A estimativa de localização não é perfeita e acumula erros ao longo do tempo. Fatores como correntes de água, turbulência, interferência magnética e outras condições ambientais podem afetar o caminho real do ROV em comparação com o caminho estimado. Estes erros podem acumular-se, levando a uma divergência entre as posições estimadas e reais.
Métodos de correção: Para mitigar o acúmulo de erros, os ROVs Deep Trekker incorporam algoritmos e tecnologias de fusão de sensores, utilizando sensores como:
- Unidade de Medição Inercial (IMU): Mede e relata a força específica de um veículo, taxa angular e, às vezes, seu campo magnético, normalmente usados em aplicações de navegação e orientação, e pode ajudar a refinar informações de direção e altitude;
- Registro de velocidade Doppler (DVL): utilizado em sistemas de navegação subaquática para medir a velocidade de um veículo em relação à água circundante, analisando o deslocamento Doppler em sinais acústicos refletidos no fundo do mar. Este sensor mede a velocidade dos ROVs em relação à água, ajudando a corrigir a deriva causada pelas correntes.
- Sonar e Sistemas Acústicos: Tecnologias de sensores que utilizam ondas sonoras, como Sonar e USBL, para detectar e interpretar objetos subaquáticos, características do terreno e condições ambientais. Esses sistemas podem ser usados para mapeamento e localização de terreno. Ao comparar a assinatura acústica do ambiente com mapas pré-existentes, o ROV pode corrigir a sua estimativa de posição.
Equipamento Deep Trekker necessário para Dead Reckoning
Aqui está uma análise do equipamento necessário para uma navegação bem-sucedida usando estimativa de localização com Deep Trekker ROVs:
Parte superior:
- Controlador BRIDGE (versão principal 8 ou superior)
ROVs:
- PIVOT (3.0 ou superior)
- REVOLUTION (6.9 ou superior)
Sensores necessários:
- Sensor Pod+
- DVL
Modos de mapa e inicialização da posição do ROV
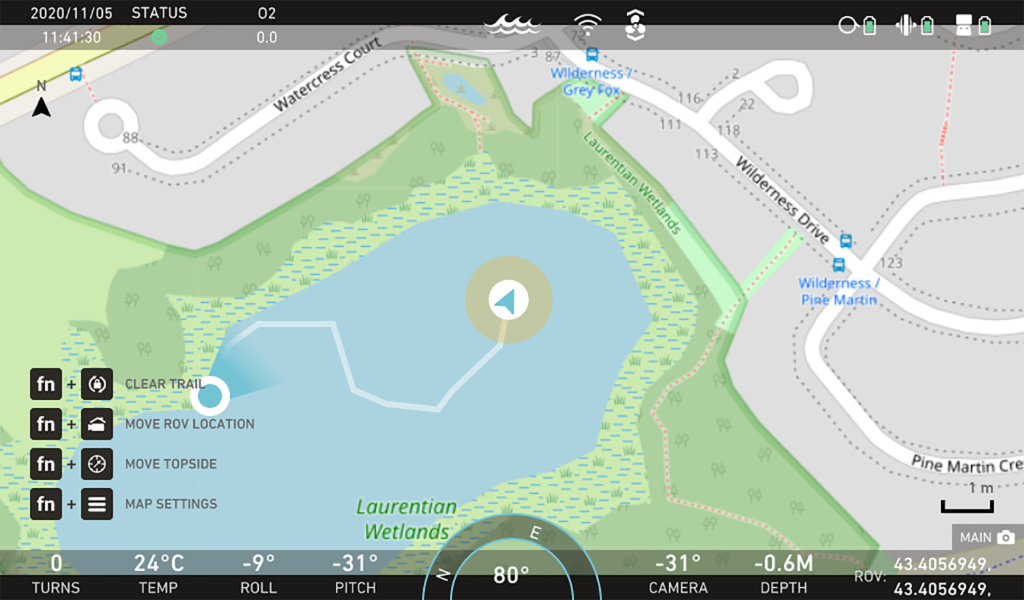
Para começar a rastrear a posição do ROV, primeiro selecione um modo de mapa através do controlador manual. Isso afetará a aparência do mapa junto com os valores usados para rastrear a posição.
Mapa local: usa uma sobreposição de grade sem blocos de mapa. Rastreia a posição através da distância em metros a partir de um ponto inicial (0,0). Este mapa pode ser útil ao operar em ambientes internos, especialmente quando as dimensões do ativo que está sendo inspecionado são conhecidas.
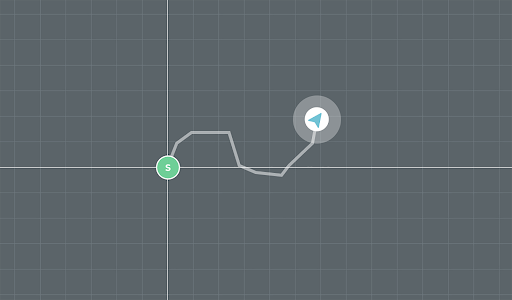
ROV: 5,8m, 2,0m
Mapa global: usa dados de mapas do mundo real e rastreia a posição por meio de latitude e longitude. Este modo permite usar diferentes estilos de mapa, como mapas de ruas ou visualização de satélite.
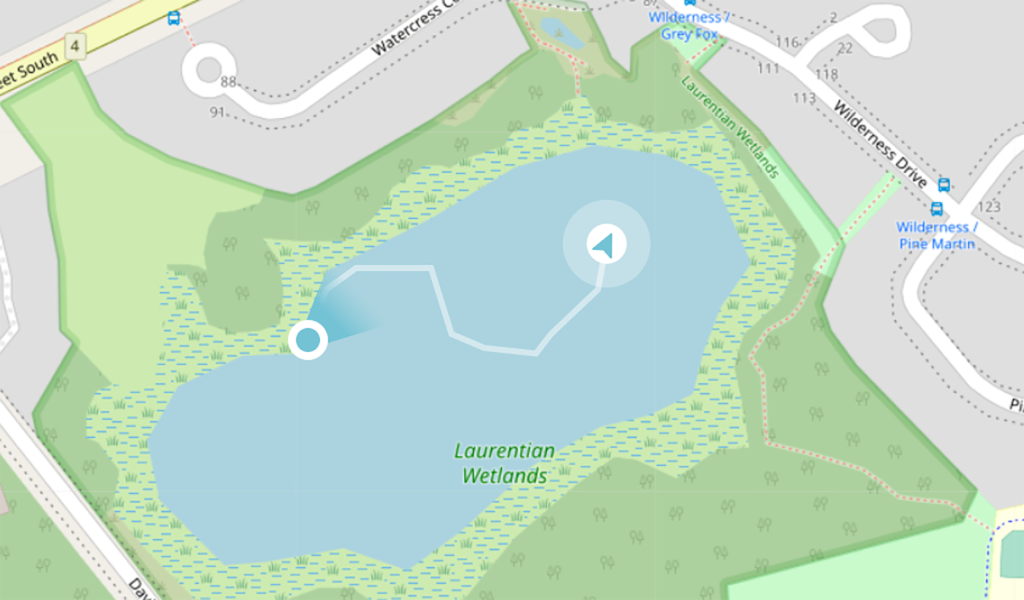
ROV: 43.4056949, -80.4676221
Na primeira inicialização, o controlador manual solicitará uma seleção entre o modo de mapa no qual operar. Você pode alternar o modo de mapa local na página de configurações de Mapas, caso contrário.
Inicializando a Posição do ROV: O último passo antes de poder rastrear a posição do ROV é dar ao veículo uma posição inicial para rastrear. Isto sempre pode ser definido manualmente através do controlador. Entretanto, o sistema também definirá automaticamente dependendo do modo de mapa ou se um USBL estiver em uso (veja o diagrama abaixo).

Se estiver usando o mapa local: Na inicialização, a posição do ROV será definida automaticamente para 0,0 metros. Depois é necessária a inicialização manual.
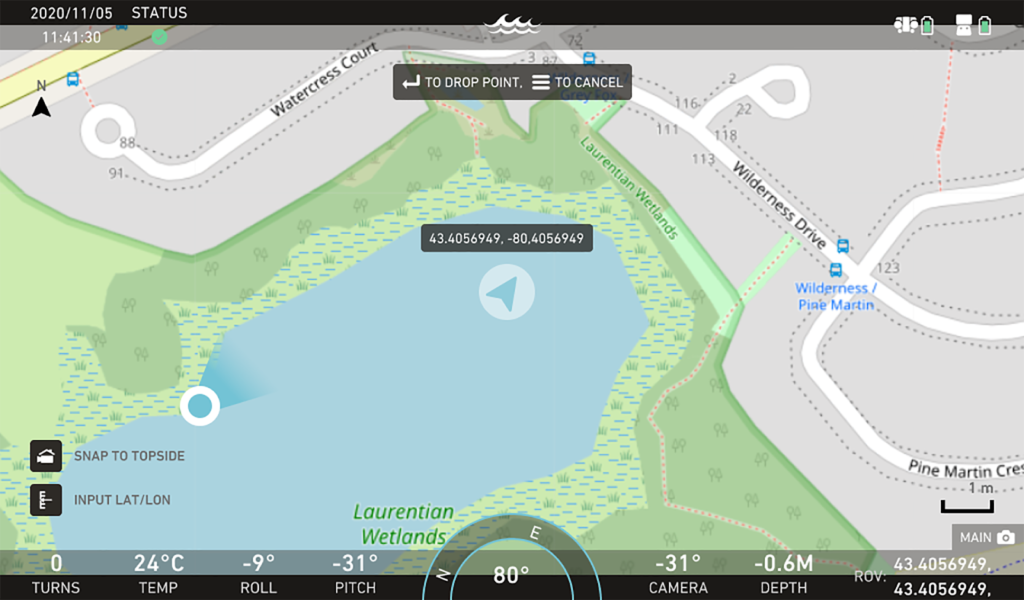
Se estiver usando o mapa global: A inicialização manual é necessária. Entretanto, se um USBL estiver em uso, seus pings corrigirão a posição do ROV automaticamente. A latitude e a longitude também podem ser inseridas através do teclado.
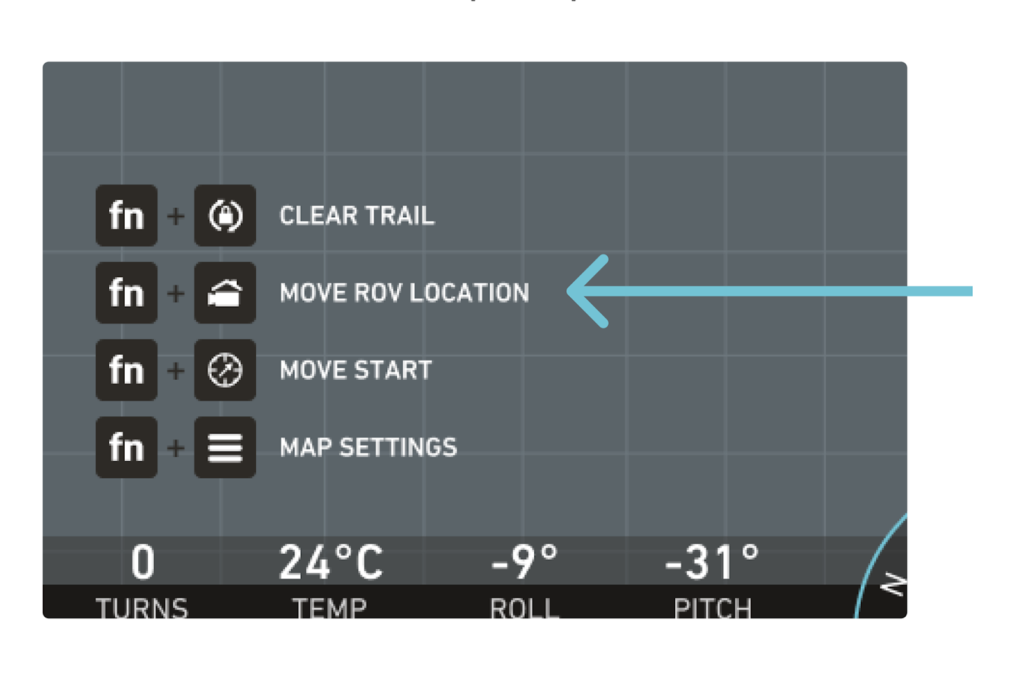
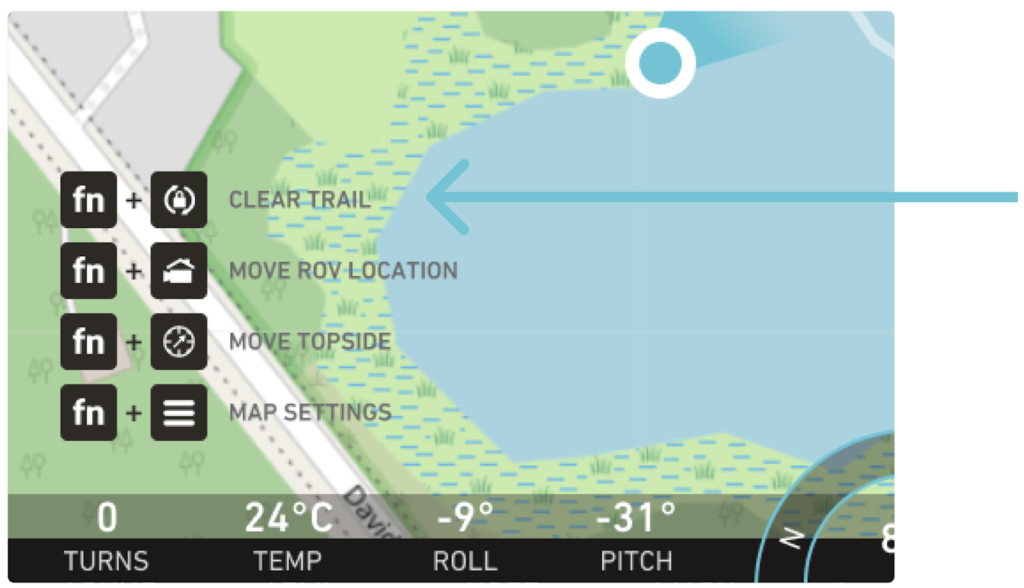
Em qualquer cenário, a posição do ROV pode ser inicializada manualmente. Apenas pressione FN + Camera Home quando o mapa mini ou em tela cheia estiver aberto:
Incerteza de Posição: Durante o de estimativa de localização a incerteza de posição do ROV continuará a crescer com o passar do tempo. Isto é representado pela bolha de incerteza vista no mapa de navegação.
Incerteza de 10-20m
Normalmente você terá 30 minutos de operação antes de atingir uma incerteza de 10 metros.
Se a incerteza da posição aumentar muito, reinicialize a posição do seu ROV quando possível, usando qualquer um dos métodos indicados acima.
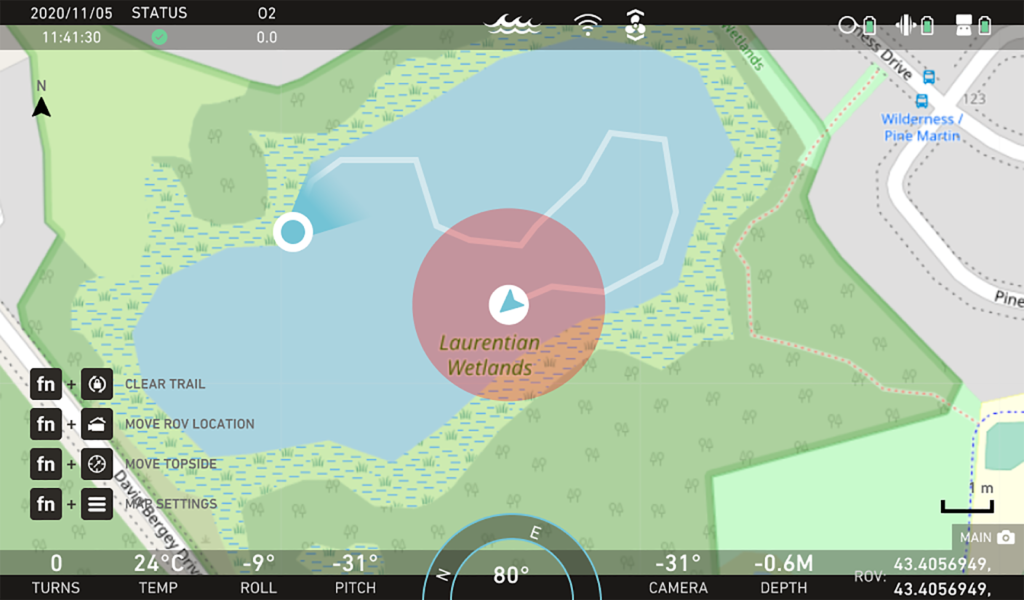
20 milhões + incerteza
Trilha do ROV: Juntamente com as outras atualizações do Controlador versão 8, o mapa exibirá as posições anteriores do ROV através de uma trilha fantasma. Enquanto houver uma posição de ROV sendo fornecida (independentemente do registro de dados), sortearemos isto.

A trilha também pode ser limpa a qualquer momento pressionando FN + Pitch Lock ou pressionando “Limpar trilha ROV” na página de configurações do Mapa.
Navegação revolucionária em robótica
No centro da inovação do Deep Trekker está a possibilidade de equipar mini ROVs com a capacidade de rastrear sua posição com rapidez e precisão durante as inspeções. Este desenvolvimento é um divisor de águas para a indústria marítima. Dessa maneira, as inspeções de rotina dos navios tornam-se mais acessíveis e eficientes do que nunca.
Ao facilitar o posicionamento preciso e a navegação de mini ROVs sob embarcações, a tecnologia estimativa de localização do Deep Trekker garante que as inspeções sejam completas, confiáveis e produzam dados abrangentes. Isto, por sua vez, permite a otimização dos cronogramas de limpeza. Assim, uma maior eficiência de combustível e economias substanciais de custos para os operadores de embarcações pode ser alcançada.
A capacidade de rastrear rápida e facilmente a posição do ROV melhora a detecção precoce de defeitos através do monitoramento regular da corrosão. Deste modo, ao identificar os locais exatos de defeitos notáveis, a tecnologia do Deep Trekker permite que os profissionais marítimos resolvam os problemas prontamente, reduzindo o risco de reparos dispendiosos no futuro.
O recurso Mission Planner do Deep Trekker também é incrivelmente poderoso e benéfico. Ele possui a capacidade de rastrear por onde o ROV foi e coletar dados de pontos de referência específicos. Ele utiliza algoritmos avançados para localização inteligente de caminhos para uma navegação precisa, à medida que o ROV segue autonomamente os pontos de referência designados, otimizando a eficiência e reduzindo a carga de trabalho do operador.
Equipados com sensores IMUs, DVL e USBL, os ROVs Deep Trekker podem interpretar dados de posição ao vivo, permitindo uma navegação autônoma contínua. Basta definir pontos de referência arrastando e soltando ou fazendo upload de coordenadas predefinidas. Depois, observe enquanto o ROV segue o caminho designado, registrando dados ao longo do caminho.
Uma vez calibrado e implantado, o ROV pode começar a rotear em segundos. Ele estará pronto para começar a navegar entre pontos de referência, com opções para alterar a velocidade e a profundidade, enquanto registra simultaneamente os dados ao longo do caminho.
Talvez mais notavelmente, os avanços nas tecnologias de câmeras subaquáticas tornaram cada vez mais econômica a implantação de ROVs equipados com a capacidade de construir modelos fotogramétricos 3D de embarcações e componentes-chave, como hélices, lemes e caixas marítimas. O sistema do Deep Trekker promete ser uma ferramenta inestimável para medições e avaliações precisas, reforçando assim a precisão geral das inspeções.
Perspectivas futuras e inovações em inspeções de embarcações baseadas em ROV
A estimativa de localização é uma técnica de navegação fundamental que ROVs e veículos subaquáticos usam para estimar sua posição e navegar em ambientes desafiadores ou negados por GPS, embora forneça estimativas de posição contínuas. É importante combiná-lo com outros dados de sensores e métodos de correção para manter a precisão, especialmente em condições subaquáticas dinâmicas.
Na indústria marítima, a eficiência, a precisão e a relação custo-benefício são essenciais para as operações. A tecnologia estimativa de localização da Deep Trekker é um exemplo do potencial desta inovação para remodelar práticas de longa data da indústria e superar os desafios históricos da navegação subaquática.
“Os avanços contínuos na tecnologia ROV, juntamente com o refinamento contínuo dos algoritmos de estimativa de localização apontam para um futuro emocionante para as inspeções de embarcações”.
Inovações como navegação autônoma, algoritmos de aprendizado de máquina e técnicas avançadas de fusão de sensores prometem aprimorar ainda mais as capacidades dos ROVs para a realização de inspeções abrangentes e eficientes.
À medida que estas tecnologias continuam a evoluir, os ROVs equipados com estimativa de localização desempenharão um papel cada vez mais proeminente na manutenção da integridade dos navios e na garantia da segurança marítima nos próximos anos.
A vantagem do Deep Trekker
Os designers da Deep Trekker projetam os ROVs para oferecer versatilidade e durabilidade, utilizando materiais robustos de nível industrial. Eles oferecem implantação imediata e uma variedade abrangente de recursos avançados. Esses ROVs são altamente portáteis e rápidos de configurar, apresentando iluminação LED poderosa, transmissão de vídeo 4K ao vivo e campo de visão de até 360 graus, sonar de imagem e ferramentas de amostragem flexíveis.
Nossa equipe experiente está à sua disposição para oferecer orientação especializada para uma ampla gama de aplicações, desde a inspeção de cascos de navios até tanques de água e a realização de avaliações subaquáticas em vários setores. Garantimos soluções sob medida que atendem exatamente às suas necessidades específicas. Quando você estiver preparado para adquirir seu ROV Deep Trekker, não hesite em entrar em contato conosco para um orçamento personalizado.
Leia o texto original aqui.

")
